TAREA ARDUINO
Por Andrea, Jon Ander y Daniel.
Por Andrea, Jon Ander y Daniel.
SENSOR DE TEMPERATURA, ¿QUÉ ES?
Los sensores de temperatura son dispositivos que transforman los cambios de temperatura en cambios en señales eléctricas que son procesados por equipo electrico o electrónico.
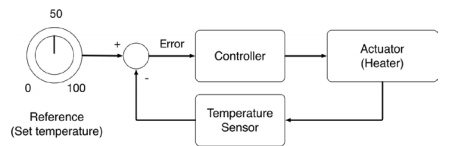
CONTROLADOR PID
Un controlador PID es simplemente un controlador de segundo orden que contiene un integrador.
La estructura del PID por lo general tiene la suficiente flexibilidad como para alcanzar excelentes resultados en muchas aplicaciones.
P es el termino proporcional. Este, genera una actuación de control
correctivo proporcional al error.
Cp(s) = Kp
I es el término integral. Este, genera una corrección proporcional a la integral del error. Esto
nos asegura que si aplicamos un esfuerzo de control suficiente, el error de seguimiento
se reduce a cero.
Ci(s) = Ki/s
D es el término derivativo, el cuál genera una acción de control proporcional al cambio de
rango del error. Esto ,tiende a tener un efecto estabilizante pero por lo general genera
actuaciones de control grandes.
La fórmula final del PID:
CPID(s)= Kp(1+1/Tis+TdS)
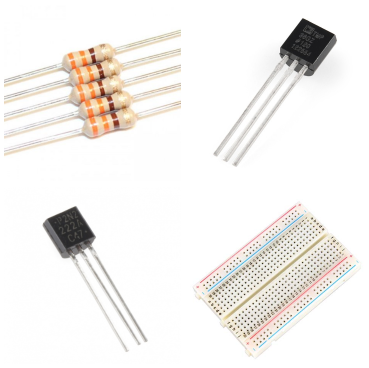
MATERIALES
ESQUEMA ELECTRONICO DEL CIRCUITO
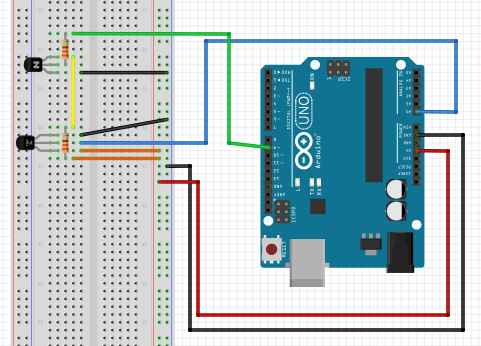
Se trata de conectarlo tal y cómo indica el sistema de conexión que aparece en el esquema para recibir datos y monitorizarlos a través del puerto serie
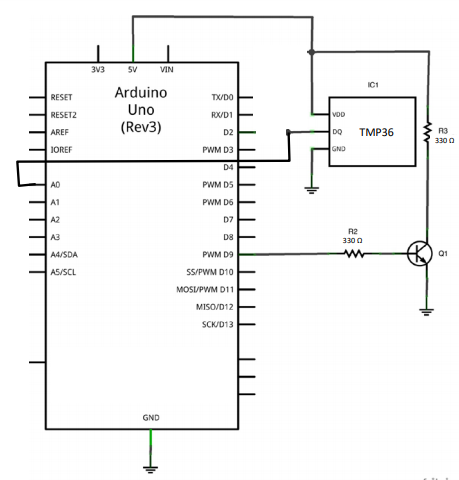
Se utilizan dos pines Arduino: el pin D9 se usa para controlar el transistor y, por lo tanto, enciende y apaga la resistencia de calefacción, y el pin A0 es la entrada del sensor digital.
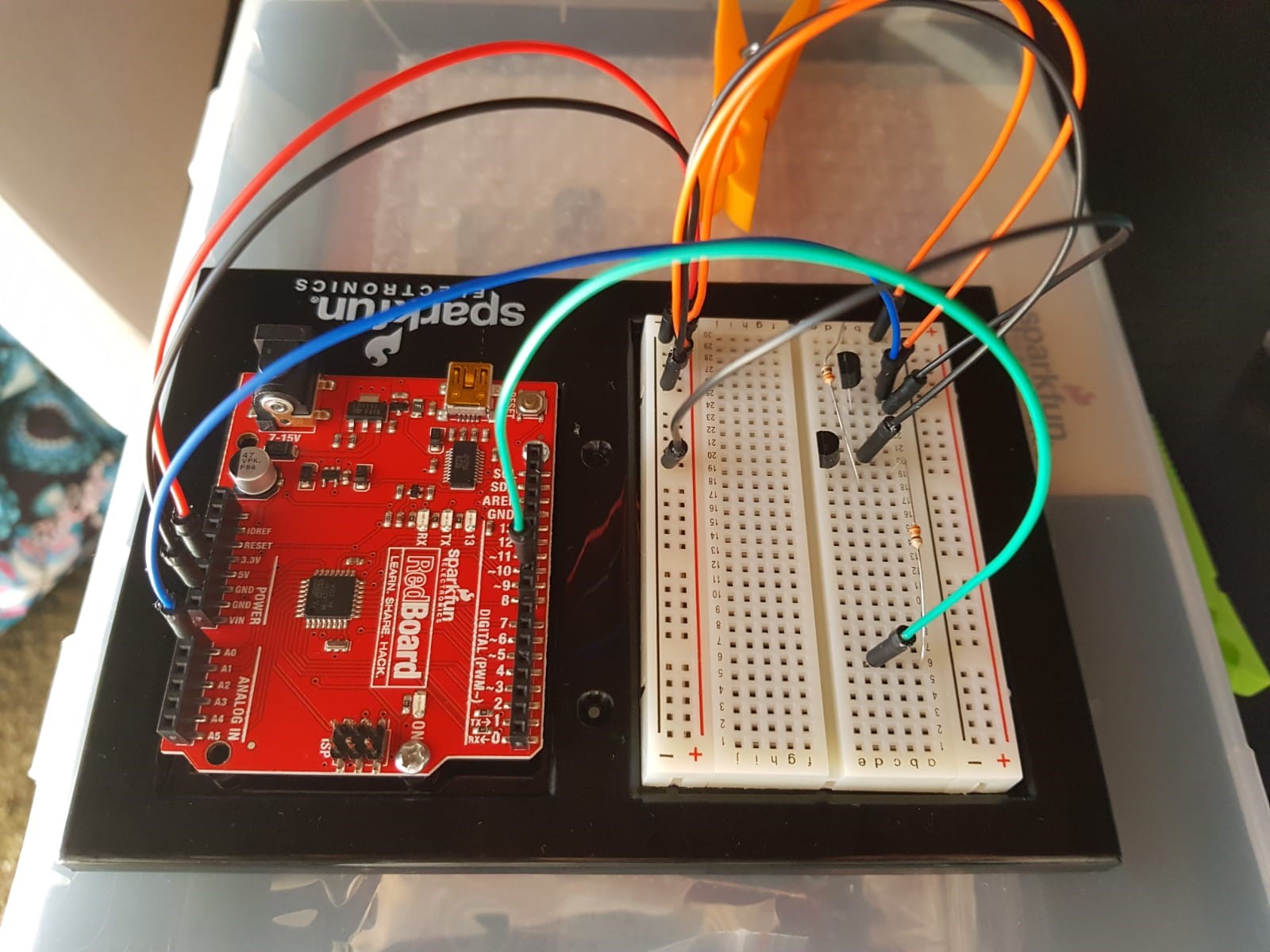
El circuito en protoboard:
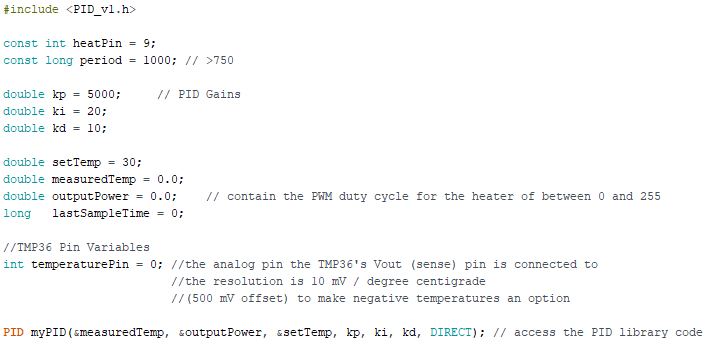
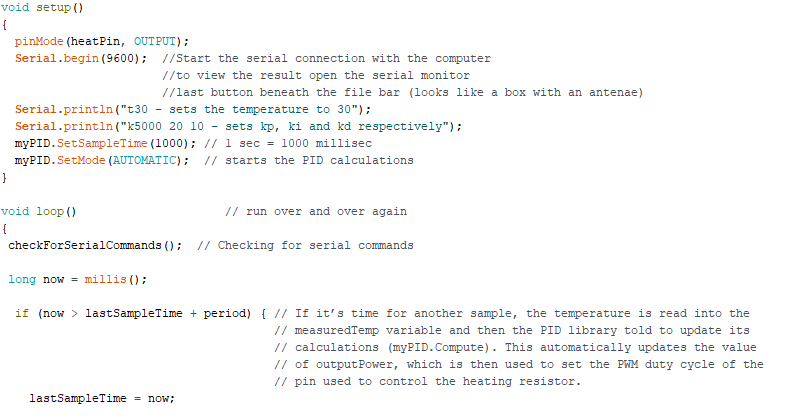
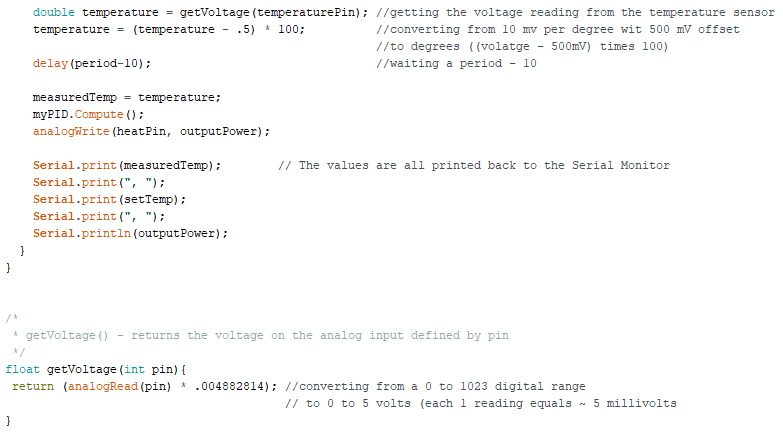
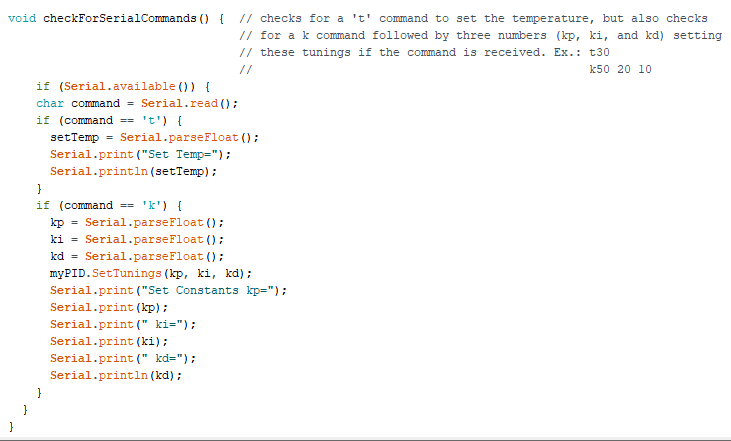
Las instrucciones del IDE de Arduino que nos van a permitir realizar esta secuencia aparecen en la siguiente imagen:
PROCEDIMIENTO
Hemos realizado la práctica para distintos valores de kp y ki, durante un tiempo determinado. Esos valores, los hemos introducido en una tabla, para posteriormente plasmarlos en una gráfica y así poder ver mejor los resultados.
PRIMER CASO:
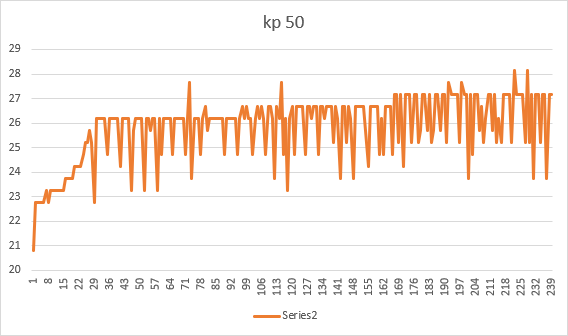
Simulando durante 240 segundos, obtenemos la gráfica anterior,en la que podemos observar que la temperatura aumenta rapidamente durante 29 segundos alcanzando una temperatura aproximada de 26ºC y después, aumenta muy lentamente llegando hasta 28ºC. Durante todo el proceso, aparecen unos picos negativos en la temperatura que disminuye entre 1 y 3 grados durante 1 segundo.
SEGUNDO CASO:
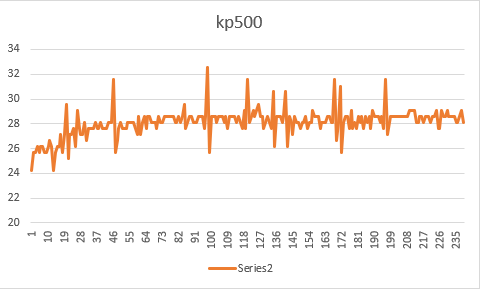
Tenemos una gráfica más estable que la anterior. Aunque presenta en algunos momentos picos en la temperatura, permanece más constante.Además, el valor entorno al cual oscila es más cercano al objetivo.
TERCER CASO:
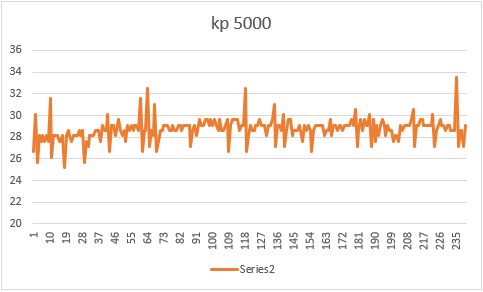
En este caso la gráfica se acerca más al valor objetivo, estableciendose entorno a 29ºC.
Se está comportando como un termostato de encendido / apagado.
CUARTO CASO:
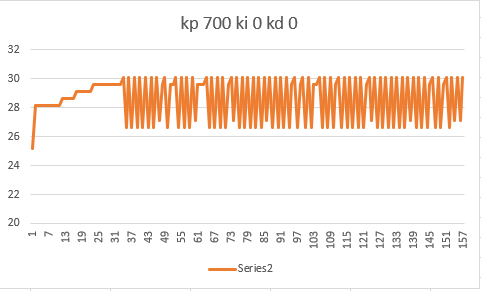
Con una kp de 700, la resistencia tarda medio minuto en alcanzar los 30ºC. Después el sistema se comporta como un encendido/apagado. En cada intervalo de medida, la corriente en la resistencia varía entre el máximo y el mínimo, y la temperatura oscila entre 26,5ºC y 30ºC.
QUINTO CASO:
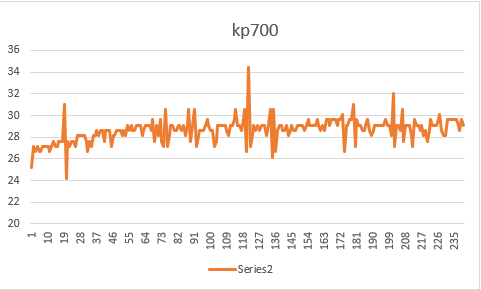
Hemos añadido un valor de ki de 420 obtenido a partir de la fórmula:
ki = (1.2 * kp) / pu
Con un valor de kp de 700 y un pu de 2.
Añadiendo una ki de 420 ,conseguimos que el sistema oscile menos, es decir, los picos de la gráfica son más pequeños, aunque todavía aparecen algunos considerablemente grandes. En esta gráfica en concreto encontramos un máximo de 34,6ºC. El valor medio una vez se establece, es más cercano a 29ºC que a nuestro objetivo de 30ºC.